More info
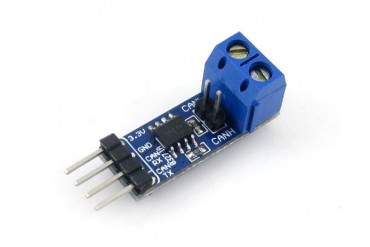
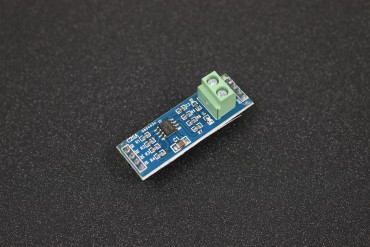
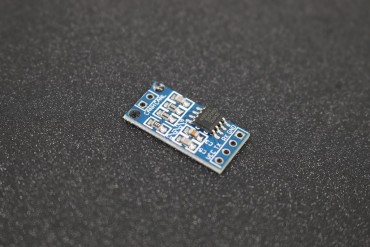
Detail about CAN Controller Interface Module
The TJA1050 is the interface between the Controller Area Network (CAN) protocol controller and the physical bus. The device provides differential transmit capability to the bus and differential receive capability to the CAN controller. The TJA1050 is the third Philips high-speed CAN transceiver after the PCA82C250 and the PCA82C251. The most important differences are:
Much lower electromagnetic emission due to optimal matching of the output signals CANH and CANL
Improved behaviour in case of an unpowered node
No standby mode.
This makes the TJA1050 eminently suitable for use in nodes that are in a power-down situation in partially powered networks.
The TJA1050 is the interface between the CAN protocol controller and the physical bus. It is primarily intended for high-speed automotive applications using baud rates from 60 kbaud up to 1 Mbaud. It provides differential transmit capability to the bus and differential receiver capability to the CAN protocol controller. It is fully compatible to the “ISO 11898” standard. A current-limiting circuit protects the transmitter output stage from damage caused by accidental short-circuit to either positive or negative supply voltage, although power dissipation increases during this fault condition. A thermal protection circuit protects the IC from damage by switching off the transmitter if the junction temperature exceeds a value of approximately 165 °C. Because the transmitter dissipates most of the power, the power dissipation and temperature of the IC is reduced. All other IC functions continue to operate. The transmitter off-state resets when pin TXD goes HIGH. The thermal protection circuit is particularly needed when a bus line short-circuits. The pins CANH and CANL are protected from automotive electrical transients.
Control pin S allows two operating modes to be selected: high-speed mode or silent mode. The high-speed mode is the normal operating mode and is selected by connecting pin S to ground. It is the default mode if pin S is not connected. However, to ensure EMI performance in applications using only the high-speed mode, it is recommended that pin S is connected to ground. In the silent mode, the transmitter is disabled. All other IC functions continue to operate. The silent mode is selected by connecting pin S to VCC and can be used to prevent network communication from being blocked, due to a CAN controller which is out of control. A ‘TXD dominant time-out’ timer circuit prevents the bus lines being driven to a permanent dominant state (blocking all network communication) if pin TXD is forced permanently LOW by a hardware and/or software application failure. The timer is triggered by a negative edge on pin TXD. If the duration of the LOW-level on pin TXD exceeds the internal timer value, the transmitter is disabled, driving the bus into a recessive state. The timer is reset by a positive edge on pin TXD.
Specifications
- supply voltage : 5.25V
- DC voltage at pin CANH : -27 ~ +40V
- DC voltage at pin CANL : -27 ~ +40V
- differential bus input voltage : 1.5 ~ 3V
- propagation delay TXD to RXD : 250ns
- virtual junction temperature : -40 ~ +150 ’C
Features
- The onboard TJA1050 CAN controller interface chip
- The chip pin has been commonly used derivation, convenience for the connection
- Pin 5v power supply
- The PCB board size: 22 mm x11.5 mm
- Fully compatible with the “ISO 11898” standard
- High speed (up to 1 Mbaud)
- Very low ElectroMagnetic Emission (EME)
- Differential receiver with wide common-mode range for high ElectroMagnetic Immunity (EMI)
- An unpowered node does not disturb the bus lines
- Transmit Data (TXD) dominant time-out function
- Silent mode in which the transmitter is disabled
- Bus pins protected against transients in an automotive environment
- Input levels compatible with 3.3 V and 5 V devices
- Thermally protected
- Short-circuit proof to battery and to ground
- At least 110 nodes can be connected.
Reviews
No customer reviews for the moment.
30 other products in the same category:
-
RDA5807M...
-
HC06...
-
ISD1820...
-

WT588D16P...
-

SG90 Tower...
-

One Channel...
-

Two Channel...
-

Four...
-
Eight...
-

Sixteen...
-

Voice...
-

Finger...
-
Ethernet...
-

A4988...
-

BH1750FVI...
-

MMA7660...
-

10DOF...
-

PAM8403...
-
NE555 Pulse...
-

NRF24L01+PA...
-

SI4432 1000...
-

HX711...
-

Rotary...
-

BMP180...
-

MAX7219 Dot...
-

LM2596 ADJ...
-
TTP229...
-

TP4056 1A...
-

MMA7455...
-
HC-05...